Research Areas
Research Projects
PROJECT CONTACT
AUVs
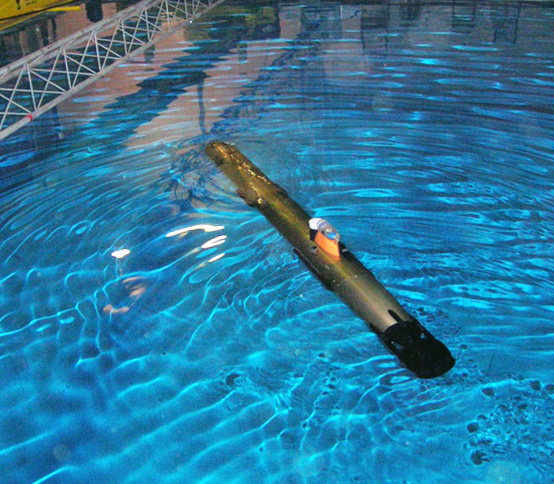
 Since 2006, CCOM/JHC researchers have been exploring the applicability of using small Autonomous Underwater Vehicles (AUVs) for collecting critical bathymetric and seafloor characterization data. Because it is nascent technology, a great deal of research and development will be required before these small, free-swimming robots become standard hydrographic tools.
Since 2006, CCOM/JHC researchers have been exploring the applicability of using small Autonomous Underwater Vehicles (AUVs) for collecting critical bathymetric and seafloor characterization data. Because it is nascent technology, a great deal of research and development will be required before these small, free-swimming robots become standard hydrographic tools.
But, says research scientist Val Schmidt who heads up the center’s AUV efforts, "It is our hope that we’ll be able to produce better maps with less time and money using underwater robots rather than conventional survey techniques."
Schmidt adds that because AUVs can accurately measure water currents and clarity, chlorophyll, temperature, and salinity in three-dimensional space they can "provide a kind of compact, synaptic snapshot that is not easily achieved from a surface ship." And this synoptic snapshot can also include high-resolution acoustic data for use in Integrated Ocean and Coastal Mapping (IOCM) efforts, which characterize the seafloor for uses other than nautical charts—fisheries habitat, for example.
 Center researchers are currently working on several challenges concerning AUVs, including developing the technology to better gauge a vehicle’s vertical position in water column—a must for seafloor mapping—and big hurdles related to navigation and data processing. For example, one project seeks to characterize the response time of all the sensors onboard an AUV in an effort to more accurately know where measurements are being made in time and space.
Center researchers are currently working on several challenges concerning AUVs, including developing the technology to better gauge a vehicle’s vertical position in water column—a must for seafloor mapping—and big hurdles related to navigation and data processing. For example, one project seeks to characterize the response time of all the sensors onboard an AUV in an effort to more accurately know where measurements are being made in time and space.
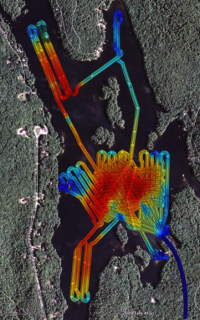
In support of the center’s AUV efforts, high-accuracy acoustic positioning buoys have been built allowing absolute sub-meter navigation of underwater vehicles, cameras and other subsurface sensors. The system provides a portable mechanism to measure drift of onboard AUV navigation solutions, augment navigation systems with external data, and precisely position other sensors such as bottom mapping cameras.



{kind=link}